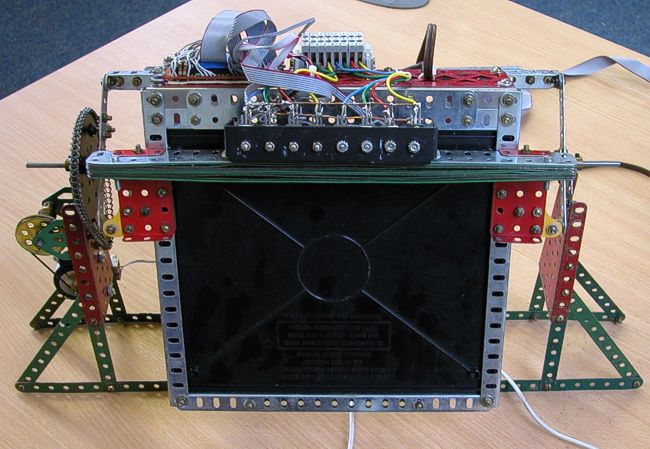
![[Photo of the computerized Etch A Sketch]](etch1.jpg)
Anyone who has tried to use an Etch A Sketch knows that a good deal of co-ordination is needed in order to draw anything but horizontal and vertical lines. It quickly becomes obvious that a computer would be far better at controlling the horizontal and vertical knobs than a human.
Accordingly, I pulled the knobs off of an Etch A Sketch and attached it to two stepper motors which in turn are attached to the parallel port of a computer. This gives one the ability to control the plotter's movements with a mouse or joystick (more intuitive interfaces than the knobs). Having a computer in the loop also allows one to record what movements are done, so one can edit them and play them back.
This robotic device is also capable of erasing the Etch A Sketch by flipping the whole contraption upside down and tilting it back and forth. The assembly has been carefully counterbalanced so that it only takes a tiny motor to flip it. A pair of mercury switches let the computer know which way is up, so that the board can be rotated to the correct positions.
The framework is built from Meccano, though there are so few moving parts that it could have easily been made of wood. The electronics are compactly built yet surprisingly complex. A C version of the software allows for control using a serial mouse. A Python version of the software allows for control using a USB joystick. One of my goals is to draw fractals on the Etch A Sketch.
 Legal statements required by
Ohio Art:
Legal statements required by
Ohio Art:
(Yes, one of their lawyers contacted me and demanded I add the above statements.)
{kind=link}
{kind=link}